为什么国产自动驾驶就是不如特斯拉?差距到底有多大年夜_特斯拉_摄像头
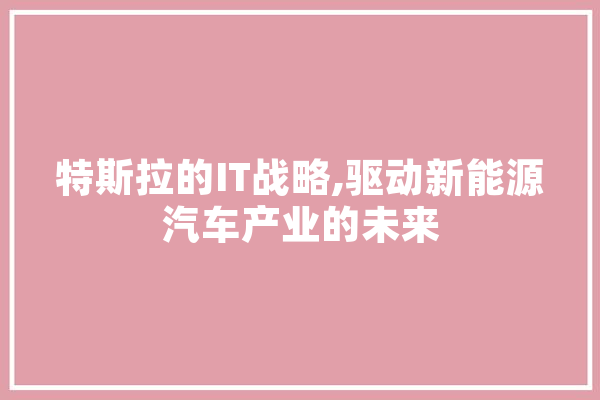
这项功能比想象中的还要刁悍,通过摄像头以及毫米波雷达实时演算(不依赖舆图,不能在开放道路利用),Model 3俨然一个蹒跚学步的幼龄孩童一样平常摸索提高,他会考试测验走捷径走直线抄近道,车速也要比预想中的更快,并且雷达测距精准,礼让行人也非常及时。

拐弯速率还挺快,路人都没创造这辆车有什么不对劲
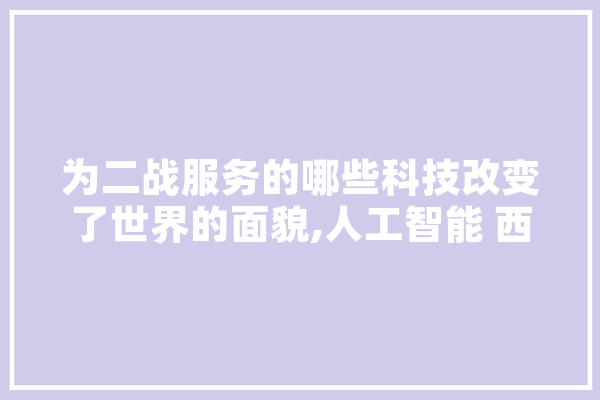
行人靠近到一定间隔就会刹停,这个过程没有引起过路妹子的警觉
不过,这项功能紧张还是针对美国大型户外停车场居多,针对性开拓的功能在中国来说还是有些水土不服的。首先在中国正儿八经供你日常停产的大型正规停车场就不多,小区里七扭八歪的挤作一团才是常态,并且行人密度极高,显然这样的环境对付召唤功能来说,是有些“强车所难”,一旦走错方向或者进入去世胡同,立时进入“懵逼”状态,掉头是这辈子都不可能掉头的。
毕竟是前视摄像头及雷达还是要刁悍的多,安全第一。
因此这项功能在中国的实用程度肯定是要打一些折扣,炫技身分家多。
但这是Autopilot、NOA(自动赞助导航驾驶)、智能召唤等功能一步步走来,让我们看到特斯拉逐渐把不可能变为可能,从观点落地到现实、乃至真正到解放双手,这才是更主要的。
特斯拉模式,是最强的么?
不愿定一定最强,但是特斯拉的模式的确自成一派,极具个人特色。就像是苹果,它强于软件,但却拥有软件、硬件双向驱动的能力。
或许你会以为特斯拉的自动驾驶厉害,是由于他的硬件非常领先吧?实在并非如此。相反,特斯拉的硬件部分,可以用“人尽皆知”来形容,其缘由在于特斯拉一反它家常态,把自己的传感器配置完完备全公布了出来,你乃至可以照搬做出千篇一律的布局,而这正好是特斯拉伟大的地方了,正如其早前就公布了一系列干系专利一样平常。
特斯拉又是怎么坚持在做这件事的呢,特斯拉在售的车型,都已经配备了完全的、支持自动驾驶的硬件,但是详细到实际体验当中,特斯拉认为自动驾驶能力不是一挥而就的,该当通过不断优化软件系统,进而逐步提升、开放自动驾驶能力。
因此,软件或者说算法才是特斯拉整套自动驾驶系统中的核心,其硬件部分无非便是摄像头、毫米波雷达、超声波雷达的组合,高大上(昂贵)的激光雷达是没有利用到的。
至于主处理器芯片,也历经了从采购到自研的三代迭代:
2014年-2016年,特斯拉配备的是基于Mobileye EyeQ3的AutoPilot HW1.0,包含1个前摄像头+1个毫米波雷达+12个超声波雷达。
2016年-2019年,基于英伟达的DRIVE PX 2 AI打算平台的AutoPilot HW2.0,以及后续的AutoPilot HW2.5,包含8个摄像头+1个毫米波雷达+12超声波雷达。
2019年-近几年,将推出基于自主研发的处理器的AutoPilot HW3.0,2019年中往后生产的Model S、Model X、Model 3已经配备了这枚性能远超第二代的FSD芯片,并且这一代并没有在其他传感器上做出改动,仅仅是升级了自动驾驶主芯片(但也不用除正式公布落后级部分传感器的可能)。
算力提升之后,特斯拉也是赶在2019年年末就推出了完备自动驾驶的预览版(FSD sneak preview),在这个版本中系统能够精准识别道路/停车标记、垃圾桶、桩桶、车道线、红绿灯,也便是说,特斯拉下一步便是开放城市道路完备赞助驾驶功能了。
OK,轮廓是清楚了,那么摄像头、毫米波雷达、超声波雷达三者,又是如何协同的呢?我们不妨抛开各传感器的型号及参数(咱也看不懂),就来大致理解一下分布也好。
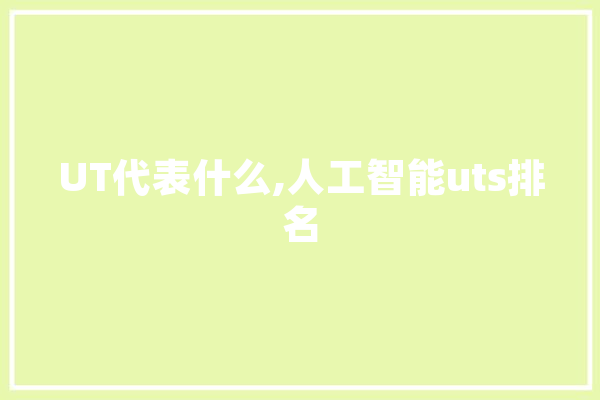
特斯拉标配的8枚摄像头,可以分为三颗前三目摄像头(长焦、标准、鱼眼)、两颗B柱摄像头、两颗翼子板后视摄像头、末了当然还有一颗后视摄像头。当然非要全算进去的话,Model 3还有一颗车内监控摄像头,只不过这颗监控摄像头对自动驾驶功能的贡献不大,紧张为的是监控司机在自动驾驶过程中的把稳力是否集中。
前三目摄像头
前翼子板后视摄像头
B柱侧视摄像头
后视摄像头
通过这8颗摄像头,特斯拉也就基本实现了360°无去世角照顾,让自动驾驶功能的实现成为了可能。
说完了摄像头,还有这颗毫米波雷达也值得关注,从早期的博世方案,再到Autopilot2.5的大陆方案,后者在探测间隔、重量、功耗方面均有所提升。不过目前这套硬件和算法被普遍认为对横向移动且反射较强的物体识别不佳(参考几次特斯拉撞上横向移动的卡车事件),因此在第三代自动驾驶当中,这将是特斯拉重点要升级、迭代的方向。
特斯拉官网上的毫米波雷达
末了还有这配备多达12枚的超声波雷达没说呢,一样平常来说,超声波雷达最便宜最常见(例如我们车上安装的倒车雷达),但也最易受到环境的影响,想要利用在自动驾驶当中开拓难度较大。
笼统上,我们认为超声波雷达探测间隔十分有限,对付环境(尤其是温度、湿度)过于敏感,其次超声波雷达也无法精确确认障碍物的详细位置,因此笔者认为这12枚超声波雷达紧张是在停车以及超车中发挥避障浸染。
说完软硬件配置,详细还是要落到实际体验当中去。特斯拉通过雷达和摄像头(视觉)的深度领悟,做出了大规模商业化且迄今为止进步最快、体验最佳的自动驾驶赞助系统。更主要的埃隆已经宣告:“在明年某个时候,特斯拉车主能在车里利用自动驾驶功能,无需人工干预”。
这不是迢遥的将来,完备自动驾驶已经近在咫尺,难道特斯拉便是毫无争议的自动驾驶第一人了么?
论资金实力与专利技能储备:Waymo才是第一
之以是先说特斯拉,紧张在于这是用户第一次打仗完备意义自动驾驶的窗口,但是真要在自动驾驶领域说出个第一人来,就不得不提Waymo了。
Waymo该当算是这个领域最有名的公司了,最早Waymo只是属于Google的一个项目部,在2016年正式独立出来,成为一家专注自动驾驶领域的公司。并且Waymo自身致力于自动驾驶算法层的研发上,其自身并不参与造车。
Waymo的方法是打造了一套自动驾驶系统,让各个汽车厂商来适配,或者压根这些厂商就把车供应给Waymo让其代劳,因此Waymo更像是供应了一种办理方案,无论你是什么汽车厂商、生产了何种用场的汽车,都可以主动适配这套系统。
看到这里你是不是以为忽然想起了什么呢?没错,这不便是手机里的安卓系统么,各个车企就像手机厂商适配安卓一样平常选用Waymo的办理方案,这套方案非常弘大、繁芜,也只有Google这样的巨子才能够完成。是不是和特斯拉、苹果的闭环模式有着明显的差异?
既然是Google ,钱肯定是没有问题,经由那么多年研发,技能又进行到哪一步了呢?
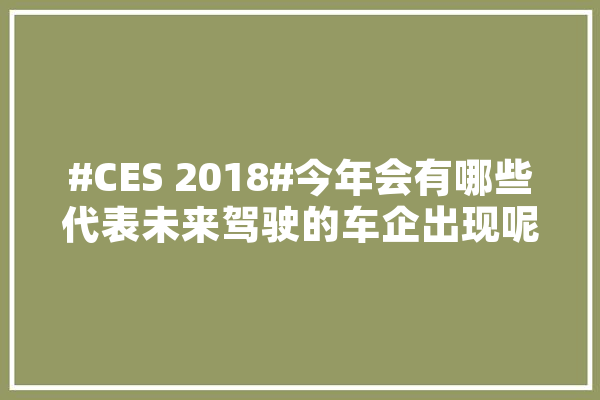
就在2019年2月,美国加州机车辆管理局(DMV)公布了一份年度报告,这份报告中包含了48家在加州持证上岗的自动驾驶路测单位,Waymo位居第一且遥遥领先。这项排名,紧张是取决于实验条件下所用的测试车数量、测试行驶里程、以及测试过程中的人工接管次数,当然是行驶里程越长、人工接管频次越少越好。
图片来源:量子位
致力于\"大众一步到位\公众的Waymo,在硬件的选择上相对特斯拉就激进很多了。首先是激光雷达,Waymo的激光雷达配备了自家研发的发射器,通过短距、中距、远距来搭建自家的镭射舆图。其摄像头的门槛也要更高,不仅仅是更高清,还加强了在强日光以及暗光下的识别能力。
其余Waymo还选择的了电磁波雷达,比较超声波来说对环境的适应能力要强上许多,不怎么受气候条件的影响,更加稳定。这还没完,Waymo乃至还增加了不少补充感应器,包括但不限于声音辨识、GPS赞助等,是不是高大上了许多?
虽说如此,毕竟Waymo的测试路况都是在实验条件下完成的,其路况繁芜程度及样本都较为有限,数百辆的试验车一年所累积的数据,就算加上刚开放不久的Waymo One无人出租运载做事,放在特斯拉巨大的交付量面前还是显得有些无力(当然特斯拉的自动驾驶功能是逐步开放的,预采集也不存在小白鼠的问题)。
因此我们认为狭义上Waymo在自动驾驶领域的专利数目遥遥领先,但是广义上特斯拉又拥有更为海量的数据,各有千秋。
还有来自主机厂的奋力一击
除了部分大厂会自己操办(例如通用的Super Cruise),对付体量相对较小的主机厂来说,投入巨资独立研发自动驾驶显然是不经济的。
对他们来说,能够选择的实在不多,基本只能依赖与上游巨子供应商的互助。
首先由上游供应商完成硬件部分的匹配,一部分车企会基于软件来开拓自动驾驶系统,但是受制于体量、资金等限定,一样平常还是要与供应商的基本方案相整合。在这种模式之下,想要发展并迭代自动驾驶能力就非常困难了。
这是由于这种形式的互助,一样平常因此上游供应商为主导,这就造成两边实在都没有太多的驱动力去提升干系的技能能力,供应商势必要优先做事更大体量的互助伙伴;因此在自动驾驶领域,大多数车企原地踏步且创新能力乏善可陈,无外乎是因于此了。
实在从这三条技能线来看,我们也就大概明白了为什么特斯拉的自动驾驶技能能够如此迅速的进化,与苹果相似的闭环研发体系,还拥有软、硬件双驱动能力,带来了目前最靠近完备自动驾驶的全新体验。
当然我们也期待着Waymo大招落地的那天,还在踟蹰不前的传统主机厂商们,真的得加把劲了。
作者 | 皆电 等一个BKB
—The End—
电动车还得看特斯拉
本文系作者个人观点,不代表本站立场,转载请注明出处!